Регулирование скорости вращения асинхронных электродвигателей. Регулирование скорости вращения асинхронных электродвигателей путем переключения числа пар полюсов
Направление вращения вала электродвигателя иногда требуется изменить. Для этого необходима реверсивная схема подключения. Ее вид зависит от того, какой у вас мотор: постоянного или переменного тока, 220В или 380В. И совсем по-другому устроен реверс трехфазного двигателя, включенного в однофазную сеть.
Для реверсивного подключения трехфазного асинхронного электродвигателя возьмем за основу схему его включения без реверса:
Эта схема позволяет вращаться валу только в одну сторону – вперед. Чтобы заставить его повернуться в другую, нужно поменять местами любые две фазы. Но в электрике принято менять только А и В, несмотря на то, что к такому же результату привели бы смены А на С и В на С. Схематично это будет выглядеть так:

Для подключения дополнительно понадобятся:
- Магнитный пускатель (или контактор) – КМ2;
- Трехкнопочная станция, состоящая из двух нормально замкнутых и одного нормально разомкнутого контактов (добавлена кнопка Пуск2).
Важно! В электрике нормально замкнутый контакт – это состояние кнопочного контакта, у которого есть только два несимметричных состояния. Первое положение (нормальное) – рабочее (замкнуто), а второе – пассивное (разомкнуто). Точно так же формулируется понятие нормально разомкнутого контакта. В первом положении кнопка пассивна, а во втором – активна. Понятно, что такая кнопка будет называться «СТОП», в то время как две другие: «ВПЕРЕД» и «НАЗАД».

Схема реверсивного подключения мало отличается от простой. Главное ее отличие состоит в электроблокировке. Она необходима для исключения пуска мотора сразу в двух направлениях, что привело бы к поломке. Конструктивно блокировка – это блок с клеммами магнитных пускателей, которые соединены в управляющей цепи.
Для запуска двигателя:
- Включите автоматы АВ1 и АВ2;
- Нажмите кнопку Пуск1 (SB1) для вращения вала по часовой стрелке или Пуск2 (SB2) для вращения в обратную сторону;
- Двигатель работает.
Если нужно сменить направление, то сначала нужно нажать кнопку «СТОП». Затем включить другую пусковую кнопку. Электрическая блокировка не позволяет активировать ее, если мотор не выключен.
Переменная сеть: электродвигатель 220 к сети 220
Реверс электродвигателя 220В возможен только в том случае, если выводы обмоток лежат вне корпуса. На рисунке ниже – схема однофазного включения, когда пусковая и рабочая намотки расположены внутри и выводов наружу не имеют. Если это ваш вариант, вы не сможете изменить направление вращения вала.

В любом другом случае для реверсирования однофазного конденсаторного АД необходимо поменять направление рабочей обмотки. Для этого вам понадобятся:
- Автомат;
- Кнопочный пост;
- Контакторы.

Схема однофазного агрегата почти ничем не отличается от той, что представлена для трехфазного асинхронного двигателя. Ранее мы перекидывали фазы: А и В. Сейчас при смене направления вместо фазного провода с одной стороны рабочей обмотки будет подключаться нулевой, а с другой – вместо нулевого фазный. И наоборот.
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей .
Частота вращения ротора равна
![]()
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором . При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.

Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
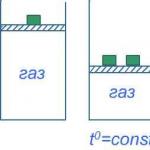
Регулирование скорости двигателя с помощью изменения напряжения питания

Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания

При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U 1 . Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U 1 необходимо производить пропорционально квадратному корню изменения частоты f 1 .
При регулировании установок с вентиляторной характеристикой , необходимо изменять подводимое напряжение U 1 пропорционально квадрату изменения частоты f 1 .
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Многоскоростные электродвигатели - асинхронные двигатели с несколькими ступенями частоты вращения, предназначены для привода механизмов, требующих ступенчатого регулирования частоты вращения.
Многоскоростные электродвигатели - электродвигатели специальной конструкции. Они имеют особую обмотку статора и нормальный короткозамкнутый ротор.
Наиболее простым способом получения двух разных чисел пар полюсов является устройство на статоре асинхронного двигателя двух независимых обмоток. Электротехнической промышленностью выпускаются такие двигатели с синхронными скоростями вращения 1000/1500 об/мин.
Существует, однако, ряд схем переключения проводников обмотки статора, при которых одна и та же обмотка может создать различные числа полюсов. Простое и широко распространенное переключение такого рода показано на рис. 1, а и б. Катушки статора, включенные последовательно, образуют две пары полюсов (рис. 1, а). Те же катушки, включенные в две параллельные цепи, как это показано на рис. 1, б, образуют одну пару полюсов.
Промышленность выпускает многоскоростные однообмоточные электродвигатели с последовательно-параллельным переключением и с отношением скоростей 1:2 с синхронными скоростями вращения 500/1000, 750/1500, 1500/3000 об/мин.
Описанный выше способ переключения не является единственным. На рис. 1, в приведена схема, образующая такое же число полюсов, как и схема, представленная на рис. 1, б.
Наибольшее распространение в промышленности получил, однако, первый способ последовательно-параллельного переключения
, так как при таком переключении от обмотки статора может быть выведено меньше проводов, а следовательно, и переключатель может быть проще.
Рис. 1. Принцип переключения полюсов асинхронного двигателя.
Три фазовые обмотки могут быть включены в трехфазную сеть звездой или треугольником. На рис. 2, а и б показано широко распространенное переключение, при котором электродвигатель для получения меньшей скорости включается треугольником с последовательным соединением катушек, а для получения большей скорости - звездой с параллельным соединением катушек (так называемой двойной звездой).
Наряду с двухскоростными электропромышленность выпускает также трехскоростные асинхронные двигатели . В этом случае статор электродвигателя имеет две отдельные обмотки, одна из которых обеспечивает две скорости путем описанного выше переключения. Вторая обмотка, включаемая обычно в звезду, обеспечивает третью скорость.
При наличии на статоре электродвигателя двух независимых обмоток, каждая из которых допускает переключение полюсов, можно получить четырехскоростной электродвигатель. Числа полюсов подбирают при этом так, чтобы скорости вращения составили нужный ряд. Схема такого электродвигателя представлена на рис. 2, в.
Следует заметить, что вращающееся магнитное поле будет наводить в трех фазах неработающей обмотки три э. д. с, одинаковые по величине и сдвинутые по фазе на 120°. Геометрическая сумма этих электродвижущих сил, как известно из электротехники, равна нулю. Однако, вследствие неточной синусоидальности фазовых э. д. с. тока сети, сумма этих э. д. с. может быть отличной от нуля. В этом случае в замкнутой неработающей обмотке возникает ток, нагревающий эту обмотку.
В целях предотвращения этого явления схему переключения полюсов составляют таким образом, чтобы неработающая обмотка была разомкнута (рис. 12, в). Вследствие небольшой величины указанного выше тока у некоторых электродвигателей, разрыва замкнутого контура неработающей обмотки иногда не делают.
Выпускаются двухобмоточные трехскоростные двигатели , имеющие синхронные скорости вращения 1000/1500/3000 и 750/1500/3000 об/мин, и четырехскоростные двигатели, имеющие 500/750/1000/1500 об/мин. Двухскоростные двигатели имеют шесть, трехскоростные - девять и четырехскоростные - 12 выводов к переключателю полюсов.
Следует заметить, что существуют схемы двухскоростных двигателей, которые при одной обмотке позволяют получить скорости вращения, отношение которых не равно 1:2. Такие электродвигатели обеспечивают синхронные скорости вращения 750/3000, 1000/1500, 1000/3000 об/мин.
Путем использования специальных схем одной обмотки можно получить также три и четыре различных числа пар полюсов. Такие однообмоточные многоскоростные электродвигатели отличаются значительно меньшими габаритными размерами, чем двухобмоточные двигатели с теми же параметрами, что весьма важно для станкостроения.
Кроме того, у однообмоточных электродвигателей несколько выше и меньше трудоемкость изготовления. Недостатком однообмоточных многоскоростных электродвигателей является наличие большего числа проводов, вводимых к переключателю.
Сложность переключателя определяется, однако, не столько числом выведенных наружу проводов, сколько числом одновременно осуществляемых переключений. В связи с этим были разработаны схемы, позволяющие при наличии одной обмотки получить три и четыре скорости при относительно простых переключателях.
Рис. 2. Схемы переключения полюсов асинхронного двигателя.
Такие электродвигатели выпускаются станкостроительной промышленностью при синхронных скоростях 1000/1500/3000, 750/1500/3000, 150/1000/1500, 750/1000/1500/3000, 500/750/1000/1500 об/мин.
Вращающий момент асинхронного двигателя может быть выражен известной формулой
где Iг - ток в цепи ротора; Ф - магнитный поток двигателя; φ2- угол сдвига фаз между векторами тока и э. д. с. ротора.
Рис. 3. Трехфазный многоскоростной электродвигатель с короткозамкнутым ротором.
Рассмотрим эту формулу применительно к вопросам регулирования скорости асинхронного двигателя.
Наибольшая продолжительно допустимая сила тока в роторе определяется допустимым нагревом и, следовательно, является примерно постоянной величиной. Если регулирование скорости ведется с постоянным магнитным потоком, то при всех скоростях двигателя наибольший длительно допустимый момент будет также величиной постоянной. Такое регулирование скорости называется регулированием с постоянным моментом.
Регулирование скорости изменением сопротивления в цепи ротора является регулированием с постоянным предельно допустимым моментом, так как магнитный поток машины при регулировании не изменяется.
Предельно допустимая полезная мощность на валу электродвигателя при меньшей скорости вращения (и, следовательно, большем числе полюсов) определяется выражением
где Iф1 - фазовый ток, предельно допустимый по условиям нагрева; Uф1 - фазовое напряжение статора при большем числе полюсов.
Предельно допустимая полезная мощность на валу электродвигателя при большей скорости вращения (и меньшем числе полюсов) где Iф2 - фазовый ток, предельно допустимый по условиям нагрева при второй схеме включения статора; Uф2- фазовое напряжение в этом случае.
При переходе от соединения треугольником к соединению звездой фазовое напряжение уменьшается в √2 раза. Таким образом, при переключении со схемы а на схему б (рис. 2) получим отношение мощностей

Принимая приближенно
получим

Иначе говоря, мощность на меньшей скорости составляет 0,86 мощности на большей скорости вращения ротора. Имея в виду относительно небольшое изменение наибольшей длительно допустимой мощности на обеих скоростях, такое регулирование условно именуют регулированием при постоянной мощности.
Если при последовательном соединении половин каждой фазы воспользоваться соединением звездой, а затем переключить на соединение параллельной звездой (рис. 2, б), то получим

Или
![]()
Таким образом, в данном случае имеет место регулирование скорости с постоянным моментом. У металлорежущих станков приводы главного движения требуют регулирования скорости с постоянной мощностью, а приводы подач - регулирования скорости с постоянным моментом.
Приведенные выше выкладки соотношения мощностей при высшей и низшей скоростях носят приближенный характер. Не была, например, учтена возможность повышения нагрузки на высоких скоростях вследствие белее интенсивного охлаждения обмоток; принятое равенство также очень приближенно. Так, для двигателя 4А имеем
![]()
![]()
В результате соотношение мощностей для этого двигателя P1/P2 = 0,71. Такие же примерно соотношения имеют место и для других двухскоростных двигателей.
Новые однообмоточные многоскоростные электродвигатели в зависимости от схемы переключения допускают регулирование скорости с постоянной мощностью и с постоянным моментом.
Небольшое число ступеней регулирования, которое может быть получено у асинхронных двигателей с переключением полюсов, обычно позволяет использовать такие двигатели на станках только при наличии специально сконструированных коробок скоростей.
Капитальный ремонт токарного станка в процессе. Главный двигатель – двухскоростной
В те времена, когда преобразователи частоты для асинхронных двигателей были роскошью (более 20 лет назад), в промышленном оборудовании в случае необходимости применялись двигатели постоянного тока, в которых имелась возможность регулировать частоту оборотов.
Способ этот был громоздкий, и наряду с ним использовался ещё один, попроще – применялись двускоростные (многоскоростные) двигатели, в которых обмотки подключаются и переключаются определённым образом по схеме Даландера, что позволяет изменять скорость вращения.
Двигатели постоянного тока с изменением скорости и управлением от электронного блока используются в дорогостоящем промышленном оборудовании.
А вот двухскоростные двигатели встречаются в станках производства СССР 1980-х годов средней ценовой категории. И по подключению лично у меня возникали проблемы, в связи с путаницей и недостатком информации.
Последние примеры – токарный станок спец. исполнения, лесопилка. Подробности будут ниже.
Исполнение обмоток напоминает соединение “треугольником”, в связи с этим переключение может быть ассоциировано со “звездой-треугольником”. И это сбивает с толку.
Схема “Звезда – Треугольник” используется для лёгкого пуска двигателей (при этом скорость в обоих режимах одинакова!), а двухскоростные двигатели с переключением обмоток – для переключения рабочих скоростей.
Существуют двигатели не только с двумя, но и с бОльшим количеством скоростей. Но я буду говорить о том, что лично подключал и держал в руках:

Двухскоростной асинхронный электродвигатель Даландера
Поменьше теории, побольше практики. И как обычно, от простого к сложному.
Обмотки двухскоростного двигателя выглядят таким образом:

Схема двухскоростного двигателя Даландера
При подключении выводов U1, V1, W1 такого двигателя к трехфазному напряжению он будет включен в “треугольник” на пониженную скорость.
А если выводы U1, V1, W1 замкнуть между собой, а питание подать на выводы U2, V2, W2, то получатся две “звезды” (YY), и скорость будет в 2 раза выше.
Что будет, если обмотки вершин треугольника U1, V1, W1 и середин сторон U2, V2, W2 поменять местами? Я думаю, ничего не изменится, тут дело только в названиях. Хотя, я не пробовал. Кто знает – напишите в комментариях к статье.
Схемы подключения
Кто немного не в курсе, как подключаются к трехфазной сети асинхронные электродвигатели – настоятельно рекомендую ознакомиться с моей статьёй . Я предполагаю, что читатель знает, как включается электродвигатель, зачем и какая нужна защита двигателя, поэтому в этой статье я эти вопросы опускаю.
В теории всё просто, а на практике приходится поломать голову.
Очевидно, что включение обмоток двигателя Даландера можно реализовать двумя путями – через переключатель и через контакторы.
Переключение скоростей с помощью переключателя
Рассмотрим сначала схему попроще – через переключатель типа ПКП-25-2. Тем более, что только такие принципиальные схемы мне и встречались.
Переключатель должен иметь три положения, одно из которых (среднее) соответствует выключенному двигателю. Про устройство переключателя – чуть позже.

Подключение двухскоростного двигателя. Схема на переключателе ПКП.
Крестиками на пунктирах положения переключателя SA1 отмечены замкнутые состояния контактов. То есть, в положении 1 питание от L1, L2, L3 подается на треугольник (выводы U1, V1, W1). Выводы U2, V2, W2 остаются не подключенными. Двигатель вращается на первой, пониженной скорости.
А что там свежего в группе ВК СамЭлектрик.ру ?
Подписывайся, и читай статью дальше:
При переключении SA1 в положение 2 выводы U1, V1, W1 замыкаются друг с другом, а питание подается на U2, V2, W2.
Переключение скоростей с помощью контакторов
При запуске с помощью контакторов схема будет выглядеть аналогично:

Схема включения двигателя на разных скоростях на контакторах
Здесь на первую скорость двигатель включает контактор КМ1, на вторую – КМ2. Очевидно, что физически КМ2 должен состоять из двух контакторов, поскольку необходимо замыкание сразу пяти силовых контактов.
Практическая реализация схемы подключения двухскоростного электродвигателя
На практике мне попадались только схемы на переключателях ПКП-25-2. Это универсальное чудо советской коммутации, у которого может быть миллион возможных сочетаний контактов. Внутри есть кулачок (их тоже несколько вариантов по форме), который можно переставлять.
Это реальная головоломка и ребус, требующий высокой концентрации сознания. Хорошо, что каждый контакт просматривается в небольшую щёлку, и можно посмотреть, когда он замкнут или разомкнут. Кроме того, через эти прорези в корпусе можно чистить контакты.
Количество положений может быть несколько, их количество ограничивается упорами, показанными на фото:

Переключатель ПКП 25. Головоломка на любителя.

Переключатель пакетный ПКП-25-2 – контакты
Практическое применение
Как я уже говорил, такие двигатели мне встречались в советских станках, которые я восстанавливал.
А именно – циркулярный деревообрабатывающий станок ЦА-2А-1, там используется двухскоростной асинхронный двигатель 4АМ100L8/4У3. Его основные параметры – первая скорость (треугольник) 700 об/мин, ток 5,0А, мощность 1,4 кВт, звёзды – 1410 об/мин, ток 5,0 А, мощность 2,4 кВт.
Меня просили сделать несколько скоростей, для разной древесины и для разной остроты циркулярной пилы. Но увы – без преобразователя частоты здесь не обойтись.
Другой старичок – токарный станок спец.исполнения УТ16П, там стоит двигатель 720/1440 об/мин, 8,9/11 А, 3,2/5,3 кВт:

Шильдик двухскоростного электродвигателя 11 кВт токарного станка
Переключение также переключателем, а схема станка выглядит так:

В этой схеме есть ошибка, как раз по теме статьи. Во первых, переключение скоростей осуществляется не реле Р2, а выключателем В2. А второе (и главное) – схема переключения абсолютно не соответствует реальности. И она меня сбила с толку, я пытался подключить по ней. Пока не сотворил вот такую схему:

Дополнительно – внешний вид и расположение элементов электросхемы.

схема токарного станка – внешний вид

схема электрическая токарного станка – расположение элементов
На этом всё.
Друзья! Кому попадаются такие станки и двигателя, пишите, делитесь опытом, задавайте вопросы, буду рад!
Обновление Март 2017
Выкладываю фото и схемы практического включения двухскоростного электродвигателя.
Двигатель работает на гидростанции. На пониженной скорости он дает малое давление, позволяющее управлять механизмами с гидравлическим приводом более точно. На повышенной скорости – давление возрастает примерно в 2 раза, и скорость перемещения соответственно.

Борно двухскоростного двигателя – на клеммы приходят 6 проводов



Контакторы двухскоростного двигателя. Левый включает в треугольник (низкая скорость), правые – двойная звезда

Мотор-автоматы. Видно, что ток треугольника – до 8А, ток звезд – до 13А

Видео работы двигателя по схеме Даландера
К сожалению, видео на русском по этой теме нет.
Схема управления для стенда, показанного выше:
Ещё схема, переключение скоростей – через Стоп:
Заточной станок на двигателе Даландера
Недавно попался станок с двухскоростным двигателем, выкладываю его схему.

Схема заточного станка на двухскоростном двигателе Даландера
Меня часто спрашивают, какую защиту сделать этому двигателю? Вот, на схеме – простое тепловое реле (РТ1), настроенное на бОльший ток (около 11 А).
Вот шильдик двигателя:

Параметры двухскоростного двигателя заточного станка
А вот – его обозначения выводов:

Как думаете, почему вместо схемы подключения показан прямоугольничек ПС (переключатель скоростей)? Правильно, схема тогда была бы в 2 раза больше и сложнее.